Ford’s Autonomous vehicles can now detect Lane-splitting Motorcycles

 With the new patent application US20180144200A1, Ford has proposed a system which can help mitigating these risks by detecting the lane-splitting vehicles. The system uses rear facing cameras linked to the controller to sense approaching lane splitting vehicle. The controller receives images from the rear facing camera. A region of interest in images is determined and converted into grey scale images. A difference image is determined between the current grey scale image and relative preceding grey scale images.
With the new patent application US20180144200A1, Ford has proposed a system which can help mitigating these risks by detecting the lane-splitting vehicles. The system uses rear facing cameras linked to the controller to sense approaching lane splitting vehicle. The controller receives images from the rear facing camera. A region of interest in images is determined and converted into grey scale images. A difference image is determined between the current grey scale image and relative preceding grey scale images.
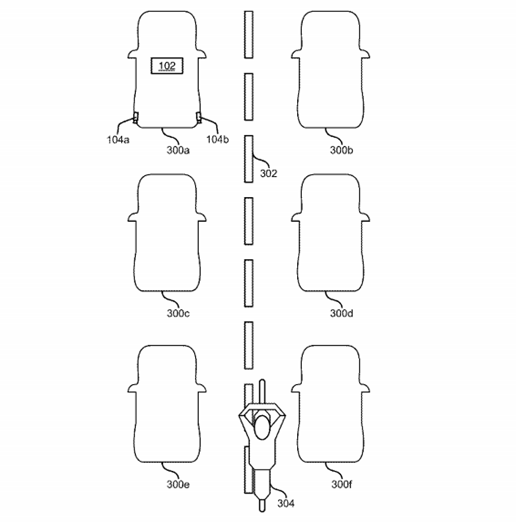 If the non-zero pixel areas in the difference images are increasing with time, the lane splitting vehicle is determined to be present and alert is generated to react upon it. The algorithms used in the controller and the other features tied to the system have potential to control vehicle upon such determination. This can trigger the host vehicle to stop, accelerate or turn in response to the detection made. The system can be used for both manual and autonomous vehicles.
Currently, most autonomous vehicles still struggle to detect motorcyclists approaching from the rear side in traffic, which means that the car initiating a sudden autonomous lane change could have even worse consequences for riders. If Ford fully develops and implements the technology disclosed in its patent, it would be a big leap towards the autonomous car and motorcycle relations.
If the non-zero pixel areas in the difference images are increasing with time, the lane splitting vehicle is determined to be present and alert is generated to react upon it. The algorithms used in the controller and the other features tied to the system have potential to control vehicle upon such determination. This can trigger the host vehicle to stop, accelerate or turn in response to the detection made. The system can be used for both manual and autonomous vehicles.
Currently, most autonomous vehicles still struggle to detect motorcyclists approaching from the rear side in traffic, which means that the car initiating a sudden autonomous lane change could have even worse consequences for riders. If Ford fully develops and implements the technology disclosed in its patent, it would be a big leap towards the autonomous car and motorcycle relations.